Siamese Tracker regularizd for 3D Shape Completion
Autonomous Navigation
 Siamese Tracker regularizd for 3D Shape Completion
Siamese Tracker regularizd for 3D Shape Completion
Autonomous Navigation
Silvio Giancola
Research Scientist
Silvio Giancola is a Research Scientist at King Abdullah University of Science and Technology (KAUST), working under the supervision of Prof. Bernard Ghanem in the Image and Video Understanding Laboratory (IVUL), part of the Visual Computing Center (VCC).
Posts
CVPR19
I attended CPVR19 in Long Beach, CA and presented Leveraging Shape Completion for 3D Siamese Tracking as a poster.
Publications
PointRGCN: Graph Convolution Networks for 3D Vehicles Detection Refinement
In autonomous driving pipelines, perception modules provide a visual understanding of the surrounding road scene. Among the perception …
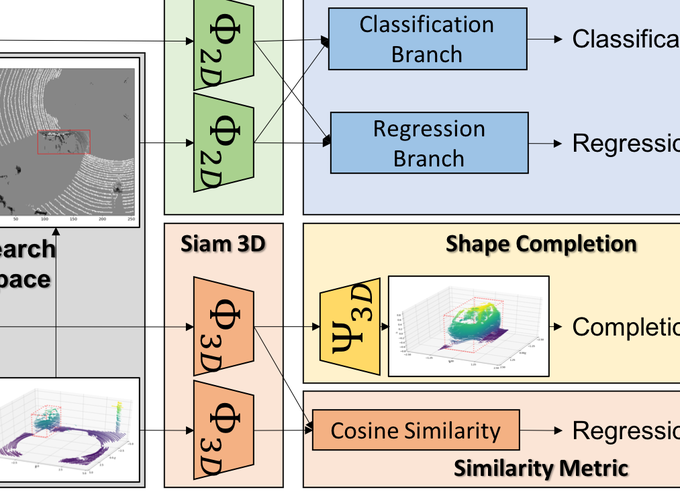
Efficient Tracking Proposals using 2D-3D Siamese Networks on LIDAR
Tracking vehicles in LIDAR point clouds is a challenging task due to the sparsity of the data and the dense search space. The lack of …
Leveraging Shape Completion for 3D Siamese Tracking
Point clouds are challenging to process due to their sparsity, therefore autonomous vehicles rely more on appearance attributes than …
