A Solution for Crime Scene Reconstruction using Time-of-Flight Cameras
 Reconstruction of a Crime Scene
Reconstruction of a Crime Scene
A Solution for Crime Scene Reconstruction using Time-of-Flight Cameras
Abstract
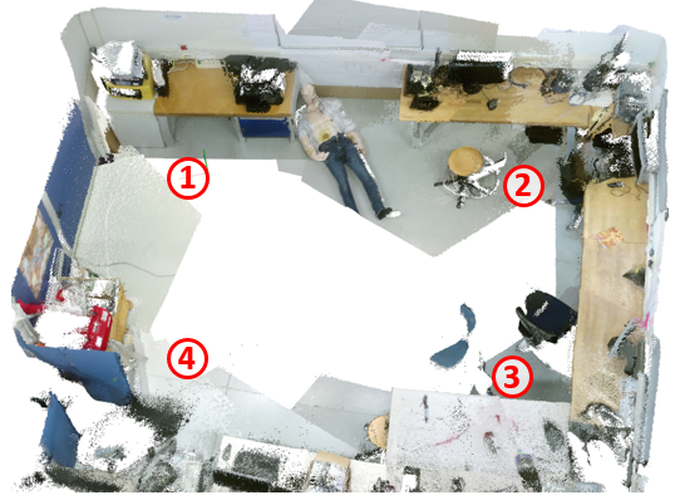
In this work, we propose a method for three-dimensional (3D) reconstruction of wide crime scene, based on a Simultaneous Localization and Mapping (SLAM) approach. We used a Kinect V2 Time-of-Flight (TOF) RGB-D camera to provide colored dense point clouds at a 30 Hz frequency. This device is moved freely (6 degrees of freedom) during the scene exploration. The implemented SLAM solution aligns successive point clouds using an 3D keypoints description and matching approach. This type of approach exploits both colorimetric and geometrical information, and permits reconstruction under poor illumination conditions. Our solution has been tested for indoor crime scene and outdoor archaeological site reconstruction, returning a mean error around one centimeter. It is less precise than environmental laser scanner solution, but more practical and portable as well as less cumbersome. Also, the hardware is definitively cheaper.
Silvio Giancola
Research Scientist
Silvio Giancola is a Research Scientist at King Abdullah University of Science and Technology (KAUST), working under the supervision of Prof. Bernard Ghanem in the Image and Video Understanding Laboratory (IVUL), part of the Visual Computing Center (VCC).