Integration of Absolute Orientation Measurements in the KinectFusion Reconstruction pipeline
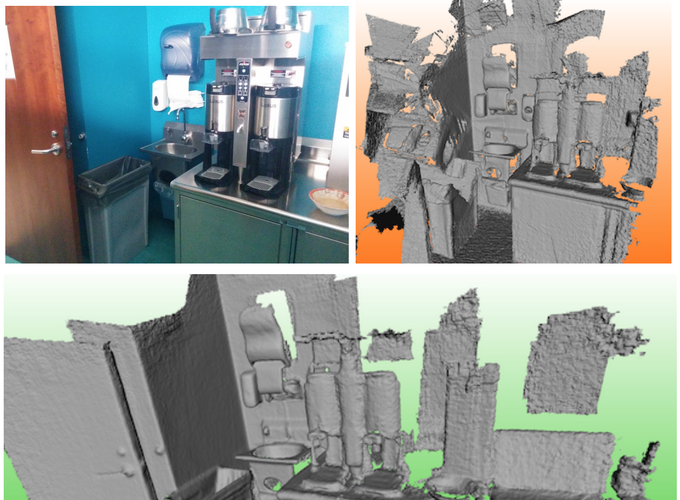 Exemple of Reconstruction using our Visual Inertial Kinect Fusion
Exemple of Reconstruction using our Visual Inertial Kinect Fusion
Integration of Absolute Orientation Measurements in the KinectFusion Reconstruction pipeline
Abstract
In this paper, we show how absolute orientation measurements provided by low-cost but high-fidelity IMU sensors can be integrated into the KinectFusion pipeline. We show that integration improves both runtime, robustness and quality of the 3D reconstruction. In particular, we use this orientation data to seed and regularize the ICP registration technique. We also present a technique to filter the pairs of 3D matched points based on the distribution of their distances. This filter is implemented efficiently on the GPU. Estimating the distribution of the distances helps control the number of iterations necessary for the convergence of the ICP algorithm. Finally, we show experimental results that highlight improvements in robustness, a speed-up of almost 12%, and a gain in tracking quality of 53% for the ATE metric on the Freiburg benchmark.
Silvio Giancola
Research Scientist
Silvio Giancola is a Research Scientist at King Abdullah University of Science and Technology (KAUST), working under the supervision of Prof. Bernard Ghanem in the Image and Video Understanding Laboratory (IVUL), part of the Visual Computing Center (VCC).