A non-contact optical technique for vehicle tracking along bounded trajectories
A non-contact optical technique for vehicle tracking along bounded trajectories
Abstract
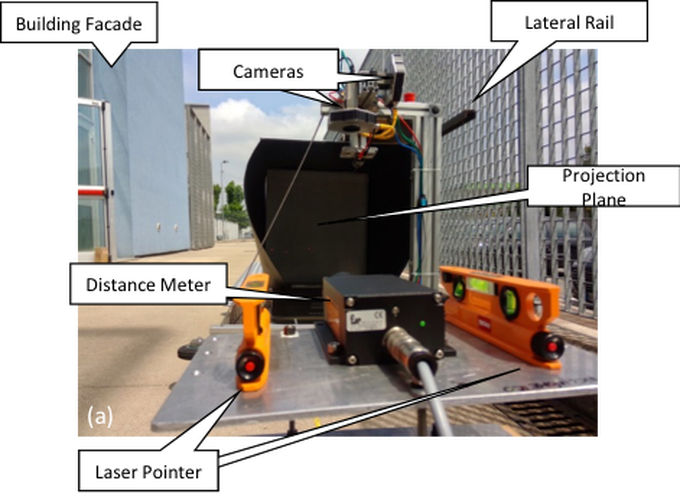
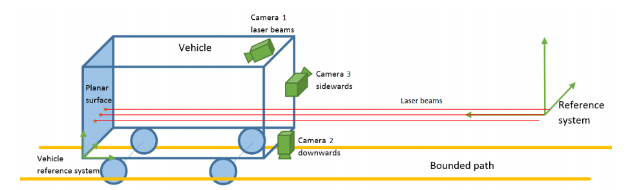
This paper presents a method for measuring the non-controlled trajectory of a cart along a bounded rectilinear path. The method uses non-contact measurement devices to identify the position of a movable laser scanner working in helical mode in order to reconstruct the 3D model of bridges. The main idea of the proposed method is to use vision systems in order to identify the coordinates of the laser scanner placed on the cart with respect to the global reference system. A fit-to-purpose vision system has been implemented: the system uses three CCD’s cameras mounted on the cart to identify the relative rotations with respect to the environment. Two lasers pointers and a laser distance meter are fixed at the starting point of the trajectory and pointing in the direction of motion of the cart, creating three dots on a plane placed on the cart. One of the camera detects the cart displacements and rotations in the plane using a blob analysis procedure. The method described in this paper has a constant uncertainty and the measurement range only depends on the lasers power. The theoretical accuracy of the measurement system is close to 1 mm for the translation along the motion direction and around 0.5 mm along the other two directions. Orientations measurement have a theoretical accuracy of less than 0.1$^o$. The solution has been implemented for the 3D reconstruction of concrete bridge; preliminary experimental results are presented and discussed.
Scheme of our system for the vehicle tracking along the bounded path
Carriage system with the three
lasers and the yellow decametre on
the ground

Silvio Giancola
Research Scientist
Silvio Giancola is a Research Scientist at King Abdullah University of Science and Technology (KAUST), working under the supervision of Prof. Bernard Ghanem in the Image and Video Understanding Laboratory (IVUL), part of the Visual Computing Center (VCC).